Puck Collect
Категория робототехнических соревнований, где два автономных робота соревнуются в скорости и качестве сборка и сортировки по цвету красных и синих пластиковых шайб
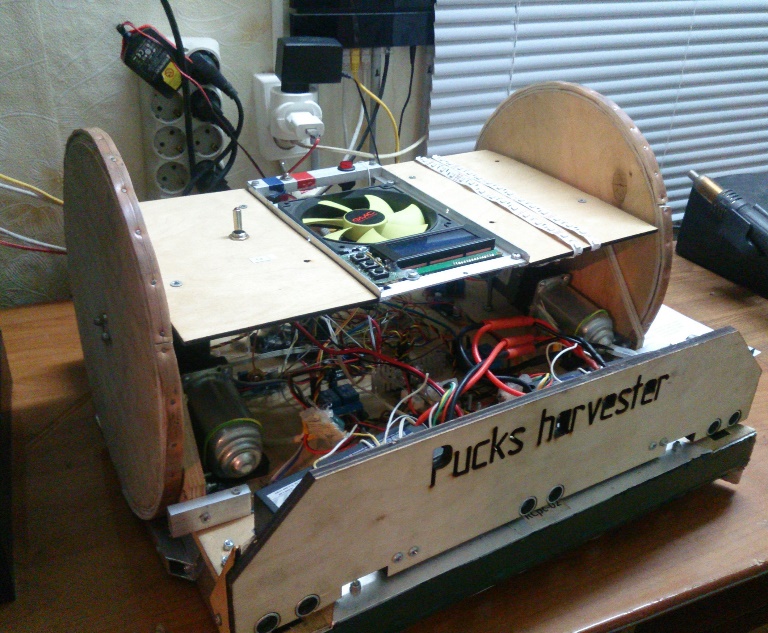
Pucks Harvester
 Наш первый робот для участия в соревнованиях за пределами родного университета.
Наш первый робот для участия в соревнованиях за пределами родного университета.
Был изготовлен с использованием доступных нам в тот момент технологий и поэтому в конструкции по большей части используется дерево.
Стал победителем с первых же соревнований категории Puck Collect, в которых принял участие и долгое время оставался безусловным фаворитом, однако через несколько лет пальма первенства ушла обновлённой версии - Puck Harvester 2, однако первый робот продолжил участие в соревнованиях и иногда всё равно занимал первые места.
Наиболее значимой победой является третье место на RobotChallenge 2018 в Пекине, Китае.
Работает на базе двух микроконтроллеров - Arduino Uno (выполняет управление движением) и STM32F103 (выполняет управление сортировкой и открытием задней заслонки).
Оборудован символьным LCD-дисплеем с тремя кнопками, позволяющими выполнять калибровку робота на цвета перед соревнованиями. Также имеет RGB-подсветку, которая индицирует цвет текущей команды, переключаемый тумблером. Как и новая версия, имеет компоновку с двумя распределительными механизмами, центральным накопителем шайб для шайб правильного цвета и двумя боковыми для шайб цвета неправильного.
Pucks Harvester 2
Наш самый “урожайный” робот в плане наград. Является дальнейшим развитием конструкции Puck Harvester с учётом обнаруженных недостатков конструкции и наших возросших технических возможностей.
Предназначен для участия в соревнованиях категории Puck Collect ("Робосортировка") и многократно занимал призовые места. Наиболее значимые победы:
- RobotChallenge 2018, Пекин, Китай (1-е место)
- RobotChallenge 2017, Пекин, Китай (2-е место)
- Robomaticon 2018, Польша, Варшава (1-е место)
Задачей роботов в категории Puck Collect является автономное перемещение по полю 2.5х2.5 метра и перемещение на базу (по двум противоположным углам игрового поля расположены квадратые базы роботов двух разных цветов соответствующего двух разным цветам шайб) пластиковых шайб правильного цвета (синие и красные) изначально случайно разбросанных по полю. За доставку шайбы своего цвета на свою базу начисляется 1 очко, за доставку шайбы чужого цвета на свою базу вычитается 1 очко (при этом не имеет значение робот какой команды доставил шайбу на каую базу, лишь совпадение цвета шайбы и цвета поверхности базы). На конструкцию роботов накладываются только ограничения по размеру (не более 40х40см) и безопасности (запрет использования двигателей внутренного сгорания и т. д.), а также запрещено ручное управление роботом во время раунда за исключением запуска и остановки.